Descripción del instrumento
El instrumento a realizar será un contrabajo electrónico.
Este contara con una variedad de sensores que buscaran representar las
funciones de las cuerdas y el arco del equivalente acústico. Estos sensores son
los siguientes:
*sensor de resistencia variable (Ni-Chrom): este sensor será
usado para las cuerdas del instrumento, con este sensor podremos, asignar
distintas notas a distintos valores de resistencias. Cada cuerda debe tener
tierra propia, no puede ir a la común.

*Encoder: Este sensor se usara
para medir la velocidad y la distancia recorrida por el arco. Esto, con la
intención de representar la duración de la nota. Así como el tipo de “arcada”
que se está realizando.

El encoder genera una señal cuadrada, ya que se empleara en modo corte-saturacion. El patrón deberá ser hecho manualmente, y en vista que se busca realizar un encoder de cuadratura, el desfase entre las señales deberá ser de 90º. Así podremos definir la velocidad de la “arcada”. Y mediante el número de ondas podremos determinar la distancia recorrida por el arco.
Finalmente para determinar que fuerza está siendo aplicada a
la “cuerda” se proponen dos sistemas, estos son:
*Capacitores: un sistema capacitivo que (donde el aire es el
dieléctrico) varia el voltaje de salida según sea la cercanía entre las placas.

*Proximidad: el otro método propuesto consiste en un simple
sensor de proximidad, el cual estará en el arco y medirá la distancia al
instrumento. Para este método podemos usar infrarrojo o ultrasonido (Sharp
GP2DI2, Devantech SRF04 y SRF05).

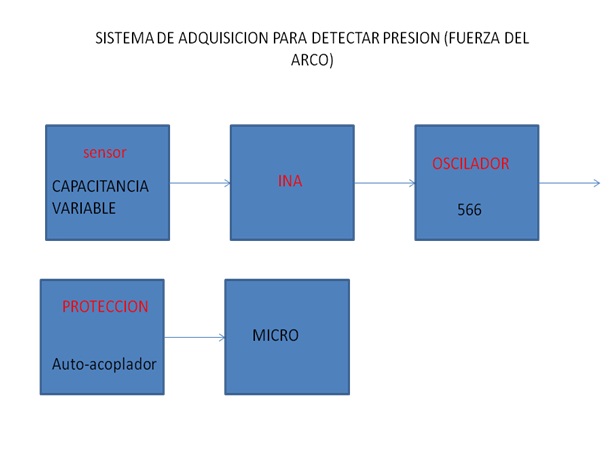
Canal de adquisición
Usaremos un canal de adquisición para poder eliminar el
offset de las señales, así como amplificar aquellas señales que lo necesiten
para poder ser aceptadas por el Microprocesador. Una estructura generalizada
original es la siguiente.

Cuerdas.

Encoder.
Para realizar el encoder de cuadratura es necesario como se
menciono antes un patrón desfasado 90º. Para esto se usara el programa “Encoder
Generator”. Este patrón se adaptara a un engranaje el cual rotara con el
movimiento del arco. Este patrón será “golpeado” por los foto-transistores (2),
creando dos señales cuadradas (ON ó OFF). Esta señal idealmente puede entrar
directamente al Micro. Dependiendo del sensor que se consiga podría ser
necesario amplificar o atenuar. Y finalmente el auto-acoplador de protección.

Entre los posibles sensores tenemos:
- Fotodiodo
- TSAL5300
VISHAY 940 nm
- Fototransistor
- XRNJ53W
SUNLED 940 nm
- Par
foto diodo/transistor
- TCRT1000
VISHAY
- HLMP-ED31
Red lamp (630nm), transparent, 30 grados, alto brillo 4200 mcd, Agilent
Technologies
- BPX81 NPN Fototransistor, 440-1070 nm, SIEMENS

Capacitive Sensor.
Se construirá
1 de estos sensores, el cual consta de un circuito RC. La capacitancia será
formada por: una lámina de aluminio del tamaño aproximado 10x10 cm, un
dieléctrico que puede ser el aire o una lámina de plástico, y otra lamina en el
arco. Para la adquisición se proponen 2 métodos:
Primero:
El
circuito será conectado a un pin de salida y a un pin de entrada del Micro. Este método consiste en cambiar el estado del pin de
salida y luego esperar a que el pin de entrada (el cual hace la función de sensor)
cambie al mismo estado. El tiempo que tarda esto en suceder es determinado por
una constante T, definida por T=R*C, donde R es el valor de la resistencia y C
es la capacitancia en el pin de entrada.
Los
valores del capacitor debe estar entre entre 20 y 400pF. Mientras que los
valores de las resistencias deben estar entre 100
y
50M
. Mientras más grande sean, mayor es la
sensibilidad; y mientras más pequeñas, mayor es la fiabilidad.

Segundo:
Procesamiento digital
Para poder trabajar con el micro, las señales analógicas
deberán ser convertidas a digital. En vista de los altos costos que representan
los conversores externo, se utilizara el modulo conversor del Micro. Como
protección para el micro se ha decidido utilizar auto-acopladores en cada pata
del puerto que vaya a ser utilizada. En el caso del contrabajo, utilizaremos
una pata del puerto para cada cuerda, 2 para el encoder y una para el sensor
que se seleccione para medir la fuerza de la “arcada”. Como protocolo de
comunicación usaremos el acordado por la sección. ENCABEZADO+DATOS+CRC+FIN DE TRAMA. En la parte DATOS,
va el protocolo MIDI.
Finalmente para la construcción del instrumento se usaran
cables multifilares para evitar malfuncionamientos por desgate de los mismos.
Los circuitos serán soldados en baquelitas, las cuales irán agrupadas en la
parte de atrás del instrumento. El material para el instrumento será madera o
plástico según sea el deseo del cliente. Este contara con una guía física en el
arco para facilitar las lecturas de los sensores y comodidad a la hora de
tocar.
OBJETIVO
|
I
|
II
|
III
|
IV
|
V
|
VI
|
VII
|
VIII
|
IX
|
X
|
XI
|
XII
|
SELECCIÓN SENSORES
|
||||||||||||
PRUEBA SENSORES
|
||||||||||||
OBTENCION DE LECTURAS
|
||||||||||||
SINTETIZAR CON LABVIEW
|
||||||||||||
CONSTRUCCION INSTRUMENTO
|
||||||||||||
PRUEBAS FINALES
|
||||||||||||
CONCIERTO
|
No hay comentarios:
Publicar un comentario